隨著汽車智能化與網聯化浪潮的推進,電子電氣架構(EEA)正經歷從傳統分布式向集中式的深刻變革。網絡技術作為電子電氣架構的核心支撐,其發展直接決定了智能網聯汽車的性能、安全與擴展能力。本文將從網絡拓撲、通信協議及關鍵技術三個維度,系統闡述智能網聯汽車電子電氣架構中的網絡技術。
一、網絡拓撲演進:從分布式到域集中
傳統汽車電子電氣架構采用分布式控制單元(ECU)通過低速總線(如LIN、CAN)連接,存在布線復雜、帶寬受限等痛點。智能網聯汽車則逐步轉向域集中架構,按功能劃分為動力域、車身域、信息娛樂域、自動駕駛域等,通過高速以太網骨干網實現域間互聯。未來將進一步向車輛集中架構(如“中央計算單元+區域控制器”)演進,通過冗余網絡設計提升系統可靠性。
二、通信協議分層:多速率協同傳輸
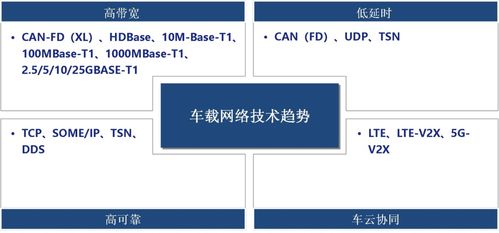
為滿足不同場景的通信需求,智能網聯汽車采用分層協議棧:
- 底層傳感器層:采用CAN-FD、FlexRay等高實時性協議,用于剎車、轉向等安全關鍵系統。
- 多媒體傳輸層:基于車載以太網(如100BASE-T1)支撐高清攝像頭、雷達數據流傳輸。
- 云端交互層:通過5G/V2X技術實現車與云、車與路側設備的低延遲通信,支持OTA升級與協同感知。
三、關鍵技術突破:TSN與安全機制
- 時間敏感網絡(TSN):通過時間同步、流量調度等技術,保障自動駕駛數據在以太網中的確定性傳輸,解決傳統IP網絡“盡力而為”的延遲隱患。
- 網絡安全防護:建立硬件安全模塊(HSM)、防火墻與入侵檢測系統,防范針對車載網絡的惡意攻擊,符合ISO/SAE 21434標準要求。
- 軟件定義網絡(SDN):通過控制器動態配置網絡資源,實現功能服務的靈活部署與故障隔離。
四、挑戰與趨勢
當前智能網聯汽車網絡仍面臨異構協議兼容性、電磁兼容性(EMC)設計、功能安全(ISO 26262)與信息安全協同等挑戰。未來將呈現三大趨勢:一是向10G車載以太網演進,支持L4級以上自動駕駛數據吞吐;二是構建基于服務的通信(SOME/IP)架構,實現軟硬件解耦;三是融合邊緣計算與車云一體網絡,形成“端-邊-云”協同的算力底座。
網絡技術如同智能網聯汽車的“神經網絡”,其革新不僅推動電子電氣架構向集中化、標準化發展,更為高階自動駕駛、智慧交通等場景落地奠定基礎。下一篇章將深入探討電子電氣架構中計算平臺與軟件架構的技術演進。